The recent rise of wireless electronic devices has generated practical interest in the field of error correction. With wireless networks prone to introducing errors in transmission, researchers have focused on developing and refining encoding schemes that add redundancy to transmitted data in order to recover errors.
In the past few years, researchers have reexamined work by Gallager[1] on low density parity check codes using regular graphs, which give good high correction rates and good speed and memory requirements. Luby et al.[3] extended this idea to use irregular graphs to get higher error correction rates. Their motivation was that regular graphs with low degree have better performance. However, nodes of high degree correct their value more quickly, so using irregular graphs could mitigate those two opposing characteristics. Currently unknown are exactly which families of graphs behave well for these codes; Luby's paper uses edge frequency distributions that work well for Tornado codes, a similar-looking erasure code developed by his research group[2]. As of now, no analytical method for choosing good graphs exists. Therefore, the trial and error mechanism is the best route for finding graphs with good error correcting properties.
We provide a toolkit with the main motivation to provide researchers with the framework to evaluate and improve upon the codes, making it easy to test various graphs with different size data inputs. This framework supports regular and irregular graphs, along with hard decision and belief propagation decoding. It includes automatic support for the binary symmetric channel along with framework for the user to add information about his/her specific Gaussian channel.
In addition, we include a command-line utility for testing the codes using the belief propagation algorithm and the zero data set, allowing for variations in graph descriptions, code rates, and graph sizes to quickly test the performance of a given graph description. Preliminary results indicate that, when using the same codes as presented in the Luby paper, our implementation of the codes yields comparable error correction rates. This code base could be used as a framework for research to find graph descriptions that correct error rates nearer to the Shannon limit than those presented in the Luby paper.
The rest of this paper is outlined as follows: Section 2 discusses the high-level objectives in LDPC implementation, and Section 3 describes how one would interface with the C++ code to try out various graph descriptions or to use the program to encode and decode a data set. Section 4 discusses specific details about data representation and algorithm implementation, and Section 5 gives preliminary performance numbers, indicating error correction rates and time and memory usage. Finally, Section 6 discusses extensions that could be made to this code base to improve its performance.
Our code design had three driving design goals: portability, a simple interface, and efficiency. Portability is key, because the decoding machine should not need any specific knowledge of the machine used to encode the message. Because the codes rely on graphs, graph construction must be done in a systematic way such that both ends build the same graph. One component of portability is the pseudo-random number generator, which must be included with the LDPC code suite in order to remove machine dependencies on random number generators. Another consideration of portability is to make certain that any rounding that ever occurs happens in a consistent and predictable way. This comes into play most visibly when translating frequencies of nodes or edges to actual numbers when building the graph. See Section 4.3 for more information on the remedy to this problem. To keep the interface clean and simple, we encapsulate all functionality in a single C++ class which supports multiple graph descriptor formats. The enclosed test suite provides logical entry points to the code base to make it easy to try out the coding process, even without fully understanding the algorithm. Finally, the coding process needed to be as efficient as possible. The algorithm can be implemented a number of ways, but there exist implementations which have speed and memory usage linear in the number of edges. One consequence of this characteristic is that the graph representation is specialized for coding. We are creating a coding package, not a graph package. So, most likely, the graphs used here will not be useful in other contexts.
We anticipate two main target audiences for this implementation: researchers and evaluators. The research audience would be those trying to find and test different graph descriptions to find graph families that give high error correction rates, most likely those trying to find ways of approaching the Shannon limit. This implementation puts in place the framework for such testing. The other potential audience is those we refer to as evaluators, who are people who wish to evaluate the performance and/or feasibility of LDPC codes for possible use in a real (i.e. non-research) setting but do not want to use the resources for their own implementation of a code that they may not even end up using. This code base and testing framework allows for straightforward feasibility studies.
We provide a simple command line utility called decode for testing belief propagation decoding. It allows full control over the following parameters:
decode -verbose -noduplicates -data=16000 -rate=.5 -maxpasses=200 -error=.05
-edgesleft=3:.1666,5:.1666,9:.1666,17:.1666,33:.1666,65:.1667
-edgesright=7:.154091,8:.147486,19:.121212,20:.228619,84:.219030,85:.129561
All the functionality for the low-density parity check codes in encapsulated in a single C++ class. Different versions of the constructor take different graph specifications to allow the user to specify node degree frequencies, edge degree frequencies, or node degree counts to describe the graph family. To specify the specific graph, the user can input either the number of data nodes and a code rate or the number of data nodes and number of check nodes. In addition, the constructor needs a PRNG seed, presumably the same one used on both the encoding and decoding ends.
The encoding and decoding processes are methods of the class. Encoding is a straightforward process that requires construction of a graph and a simple computation of the right node checksums. The class provides several decode methods, implementing both hard decision and belief propagation decoding. Each decoding algorithm provides for decoding with reliably transmitted check nodes and decoding where the right nodes are assumed to be all zero. In addition, the belief propagation decoder has support for Gaussian channel input. More detail on this is found in Section 4.7.
In addition, we provide utility functions for converting between different graph family specifications without needing to invoke a graph constructor. See Section 4.3 for more details.
We represent a graph by a list of edges, sorted by left node. All edges for a given node appear adjacent in the edge list; in fact, the edge data itself includes only the right node identifier. The left node is implicit; whenever we reach a new left node on the list, the NEW_NODE_FLAG of the edge is set, so it is simple to keep a counter of which left node we're on when passing through the edges sequentially.
We assume that the PRNG seed and right nodes are transmitted reliably. Without a reliable PRNG seed, the decoder would not build the same graph as the encoder, and decoding would fail. The reliable right side is necessary because our decoding algorithm corrects errors in left nodes based on disagreements with right node checksums. This reliable transmission on the right can be accomplished with cascading LDPC encodings or with a Reed-Solomon code. In addition, we allow for the special case in which all right nodes are zero. This can occur when testing for error correction rates of a specific graph by simply using the zero data set, or the user can arrange the graph such that all right nodes are forced to zero.
We supply a simple linear congruential pseudo-random number
generator so that both the encoder and decoder build the same
graph. We chose this family of PRNGs because of its speed, which is
essential when so much randomness is needed for building these
irregular graphs. Our current PRNG, which can easily be replaced by
the user, is
![]() , where
, where
![]() is simply the
seed required by the graph constructor[5]. Because this PRNG behaves
deterministically, the encoder and decoder will work from identical
graphs.
is simply the
seed required by the graph constructor[5]. Because this PRNG behaves
deterministically, the encoder and decoder will work from identical
graphs.
Converting from node degree frequencies or edge degree
frequencies to node degree counts, which is the representation
actually used to construct the graph, happens systematically in the
attempt to avoid problems in rounding across different machines and
operating systems. Conceptually, node frequencies are represented
by a set of ordered pairs ![]() , where
, where ![]() represents the degree of the
node, and
represents the degree of the
node, and ![]() represents the percentage of all nodes which have degree
represents the percentage of all nodes which have degree
![]() . There are
. There are
![]() such ordered
pairs, with the stipulation that
such ordered
pairs, with the stipulation that ![]() . To compute the actual number of
left (or right-the process is identical) nodes which have degree
. To compute the actual number of
left (or right-the process is identical) nodes which have degree
![]() , first
compute the cumulative frequency, given by
, first
compute the cumulative frequency, given by

Also keep a running total ![]() of the number of nodes assigned thus far. Then
the number of nodes of degree
of the number of nodes assigned thus far. Then
the number of nodes of degree ![]() is equivalent to
is equivalent to
![]() . This
round-as-you-go approach reduces the possibility that multiple
rounding errors will add up and cause the graph to have too many
nodes of degree
. This
round-as-you-go approach reduces the possibility that multiple
rounding errors will add up and cause the graph to have too many
nodes of degree ![]() . All conversions to node counts come from
node frequencies; therefore, if the user inputs edge degree
frequencies, those are first converted to node degree frequencies
and then to node counts.
. All conversions to node counts come from
node frequencies; therefore, if the user inputs edge degree
frequencies, those are first converted to node degree frequencies
and then to node counts.
In addition, the conversions have built in provisions to ensure
that the total number of edges coming out of the left side of the
graph is equal to the number of edges going into the right side of
the graph. Generally, rounding errors are such that both sides of
the graph do not come up with the same number of edges. The
converter uses the convention that the number of edges going into
the right side as the correct number of edges. If the left hand
side has ![]() extra
edges, then
extra
edges, then ![]() of the
edges of degree
of the
edges of degree ![]() become edges of degree
become edges of degree ![]() , which often involves
introducing a new degree of edges. Additional details occur if
, which often involves
introducing a new degree of edges. Additional details occur if
![]() is greater than
the number of nodes of degree
is greater than
the number of nodes of degree ![]() . This process occurs rarely and is
described in the code comments. If the left hand side has
. This process occurs rarely and is
described in the code comments. If the left hand side has
![]() edges too few,
then the opposite happens. Those
edges too few,
then the opposite happens. Those ![]() edges become edges of degree
edges become edges of degree ![]() . We work on the
assumption that by making the changes in degree to those nodes of
the largest degree, we will have a smaller overall impact on the
behavior of the graph.
. We work on the
assumption that by making the changes in degree to those nodes of
the largest degree, we will have a smaller overall impact on the
behavior of the graph.
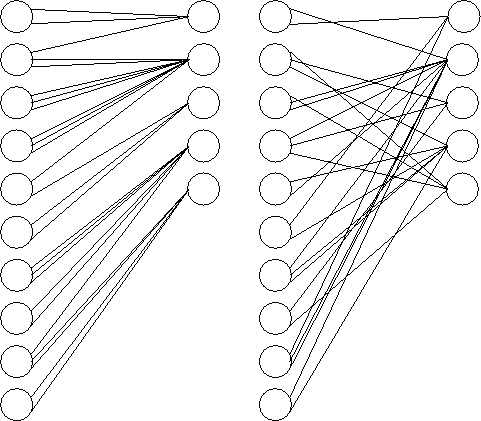
The graph constructor takes a list of node degree counts as input and creates the graph in three steps. In the first step, the node degrees are randomly assigned and the edges are given an initial layout. The constructor steps through the nodes sequentially from top to bottom on both sides at the same time. As it encounters each new node, it picks a random index into the list of remaining node degrees for the appropriate side. The process is analogous to drawing the node degrees one at a time from a hat and assigning them to nodes. As each node degree is selected, the constructor places the appropriate number of edges in place, and this is how the degree is remembered. The left side of Figure 1 shows a graph after this process has been completed.
The second part of the process is to permute the edges. The edge list is swept from beginning to end, and for each edge location (which implies the adjacent left node) a random edge is chosen from the remaining edges (forward in the list). Effectively, the right side of the edge is drawn from the remaining possible right side locations and assigned to the current left node. When this process is complete, the edges are randomly assigned as illustrated in the second part of Figure 1.
 |
This process leaves the possibility of duplicate edges and other small cycles. In the third part of the graph construction process, we remove duplicate edges. Each left node is scanned sequentially for duplicate edges. When one is found, it is randomly swapped with another edge in the graph (again, this has the effect of swapping the right side of the edge), making sure that the swap does not itself create another duplicate edge for either involved node.
This graph construction algorithm has a few advantages. The graph is created with the precise number of nodes of each degree as specified by the user, so experiments with different node degrees will not be skewed by random variations in the graph construction. Conceptually, the node degrees are laid out randomly and then the edges are distributed randomly into the available slots; we do not have to trade any randomness in edge placement to get precise control over node degrees. All computations are done with integers so there is no danger of rounding errors varying on different platforms, which is critical for the graph constructor. Since we also provide a pseudo-random number generator, graph construction is completely deterministic for a given set of input parameters.
Encoding is straightforward and is done in a single pass through the edge list once the graph has been constructed. The right nodes are initially set to zero. Then, for each edge in the list, the current right node value is summed modulo two with its corresponding left node value.
In hard decision decoding, each right node casts a vote to each of its adjacent left nodes as to what value that left hand bit should have. Each vote is determined by summing the adjacent left nodes modulo two and comparing the result with the check node that was computed at the time of encoding. In our implementation, we start each round of voting by initializing the right nodes to the check node values and then adding the adjacent left nodes modulo two (much like the encoding process). For a correct set of left nodes, the result is all zeros on the right side. Each node with value one on the right side means that that node votes for each of its adjacent left nodes to change its current value (since this would force the right node to zero). To actually tally the votes, the decoder iterates through the edge list a single time. The adjacent edges for each left node appear together, so it is convenient to collect the votes from all the adjacent right nodes, and the result is checked to see if the vote is decisive as determined by the voting thresholds that the user specifies for each iteration. If the voting is not decisive, then the left node is restored to its transmitted value.
In all, each iteration of the algorithm requires two passes through the edge list. The decoder completes successfully when all of the right nodes agree with the original check nodes. It this does not happen after a specified number of rounds, then the decoder terminates in failure.
Hard decision decoding does not give error correction rates as high as the belief propagation method. Even for irregular graphs, the highest rate of error correction Luby et al.[3] obtained was 6.27%. However, that does not negate the usefulness of this method in certain situations. For example, in a channel with small error rates, for example, 5% or less, in which decoding speed is a primary consideration, hard decision decoding would perform admirably. It uses integer and bit operations and is a good candidate for hardware implementation. This method sacrifices some error correction in order to achieve greater speed.
Using the algorithm described by MacKay[4], belief propagation decoding proceeds in
rounds, each round updating a pair of variables associated with
each edge. One variable, denoted by ![]() , represents the probability that left node
, represents the probability that left node
![]() has a value of
has a value of
![]() given the
information gathered from all the check nodes other than
given the
information gathered from all the check nodes other than
![]() . The other
variable,
. The other
variable, ![]() ,
indicates the probability that the right node
,
indicates the probability that the right node ![]() is satisfied given that the
left node
is satisfied given that the
left node ![]() has
fixed value
has
fixed value ![]() and
including information obtained from other edges leading into node
and
including information obtained from other edges leading into node
![]() . Decoding
proceeds in two passes per round, updating the
. Decoding
proceeds in two passes per round, updating the ![]() variables in one pass and the
variables in one pass and the
![]() variables in the
other pass. Each round, the left nodes are tentatively assigned
values of
variables in the
other pass. Each round, the left nodes are tentatively assigned
values of ![]() or
or
![]() based on the
information gathered from all
based on the
information gathered from all ![]() for each data node
for each data node ![]() , treating the values obtained
as probabilities that the left node is
, treating the values obtained
as probabilities that the left node is ![]() and rounding appropriately. The
algorithm terminates when a tentative assignment satisfies all the
check nodes. If the algorithm does not terminate with success after
a user-specified number of rounds, the decoder terminates with
failure.
and rounding appropriately. The
algorithm terminates when a tentative assignment satisfies all the
check nodes. If the algorithm does not terminate with success after
a user-specified number of rounds, the decoder terminates with
failure.
Currently, the belief propagation decoding algorithm supports input from the binary symmetric channel, requiring the error fraction of the channel to compute initial probabilities to start decoding. The framework is in place to support decoding from the Gaussian channel; only initial probabilities change. However, the exact values of the initial probabilities are dependent on the specific Gaussian channel, and so a user wanting to decode over the Gaussian channel must first normalize the values obtained from the channel to be probabilities.
In empirical trials, belief propagation easily outperforms the highest error correction rate for hard decision decoding cited by Luby. However, it does so by using floating point calculations, storing the large variables and performing the expensive arithmetic operations. As a result, in practice such high error correction rates would be relatively slow, although still linear time.
The graph representation and decoding algorithms are constructed in such a way as to keep the amount of time and space linear in the number of edges. As evident in Table 1, both time and memory usage increase linearly with the number of data bits. Therefore, splitting up a large message into smaller pieces, encoding and decoding each one separately, would not speed up the overall process. However, if only a fixed amount of memory is available for decoding, a good strategy would be breaking up the message and decoding one chunk at a time, reusing the same piece of memory.
|
Using the code parameters summarized in Table 2, we duplicated some of the experiments from the Luby paper to see if our results were comparable. We found that the algorithm consistently decoded 8% errors, and it often did better.
|
|
We did the same trials as above, this time using the rate
![]() codes. Again, the error
correction rates were comparable to those from the paper. Sanity
check trials indicated an error correction rate of around
16.5%.
codes. Again, the error
correction rates were comparable to those from the paper. Sanity
check trials indicated an error correction rate of around
16.5%.
|
In his paper[4], MacKay indicates that removal of small cycles is necessary for provable error correction rates. In practice, this appears to have a minimal effect, although its effect is not provable. However, an implementation of small cycle removals in the graph constructor could lead to a higher error correction rate. The paper defines ``small'' as 2 times the number of iterations the decode takes. This is most likely unreasonably large; an effective small cycle remover would likely use a more manageable definition of ``small.''
As implemented, our decoder requires that the right-hand nodes be error-free, which is accomplished through error-free transmission or encoding of the zero data set to ensure that the check nodes are all zero. In the future, we could implement the ability to force the right nodes to zero for any arbitrary data set. In addition, we could implement the framework to make it more natural to cascade multiple layers in order to get the reliable check nodes.
The most logical extension of this project is to use this framework for testing a variety of different graph families to find edge distributions that give good error correction rates. A follow-up paper would indicate distributions which seem most promising for error corrections.